TIM简介
- TIM(Timer)定时器。
- 定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断。
- 16位计数器、预分频器、自动重装寄存器的时基单元,在72MHz计数时钟下可以实现最大59.65s的定时。
- 不仅具备基本的定时中断功能,而且还包含内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等多种功能。
- 根据复杂度和应用场景分为了高级定时器、通用定时器、基本定时器三种类型。
定时器类型
| 类型 | 编号 | 总线 | 功能 |
|---|---|---|---|
| 高级定时器 | TIM1、TIM8 | APB2 | 拥有通用定时器全部功能,并额外具有重复计数器、死区生成、互补输出、刹车输入等功能 |
| 通用定时器 | TIM2、TIM3、TIM4、TIM5 | APB1 | 拥有基本定时器全部功能,并额外具有内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等功能 |
| 基本定时器 | TIM6、TIM7 | APB1 | 拥有定时中断、主模式触发DAC的功能 |
- STM32F103C8T6定时器资源:TIM1、TIM2、TIM3、TIM4
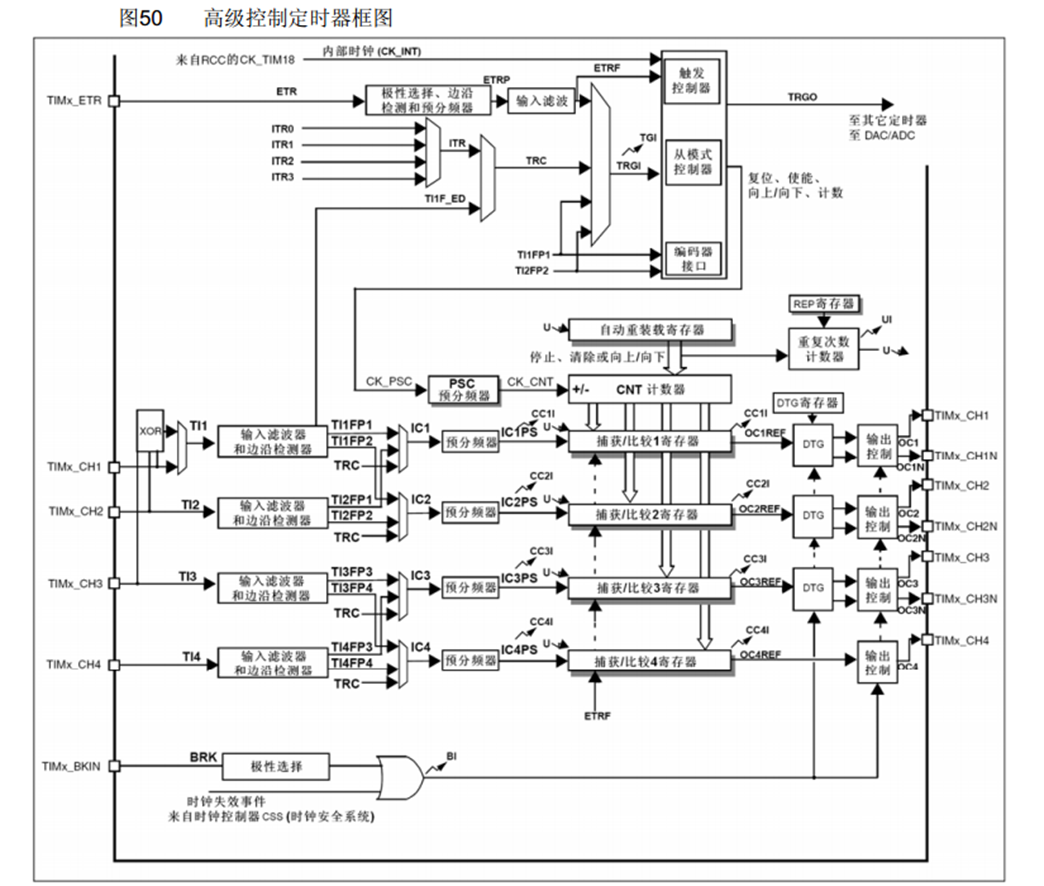
高级定时器
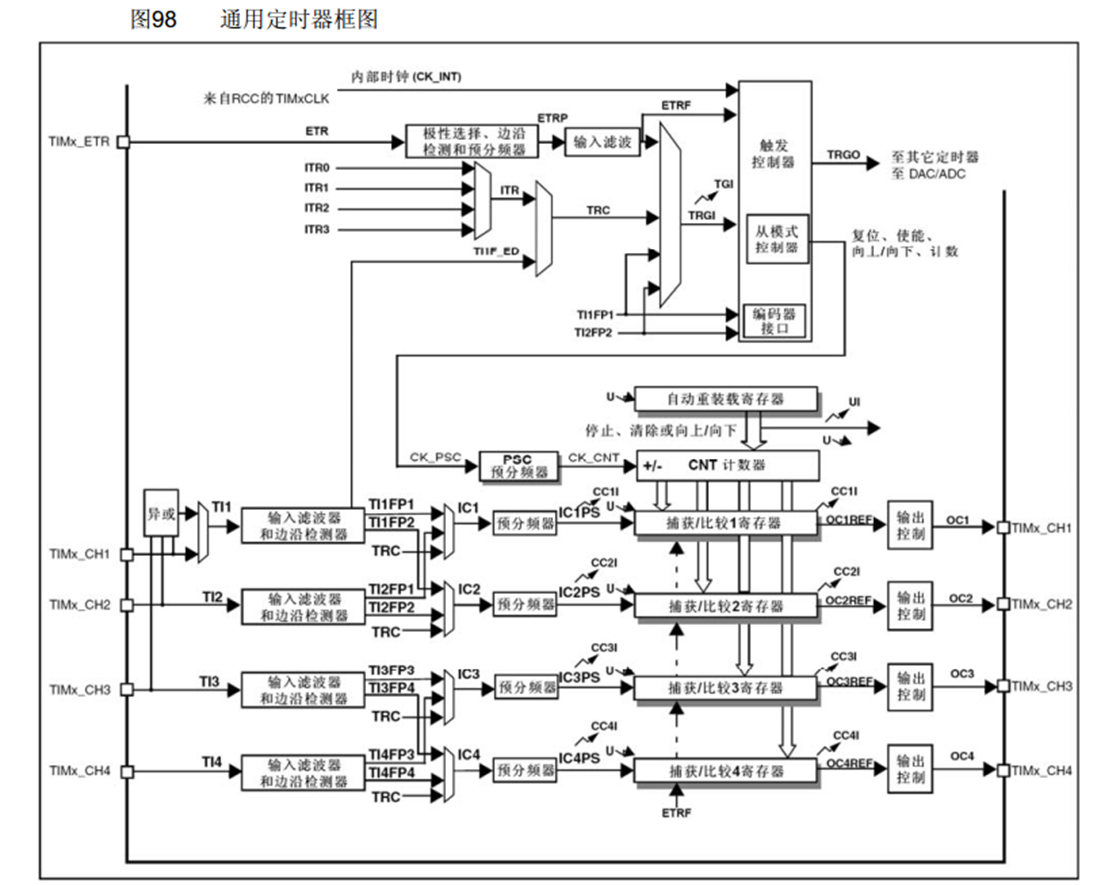
通用定时器
!
[](https://mulin.fun/usr/uploads/2023/05/3415216998.png)
{kind=link}
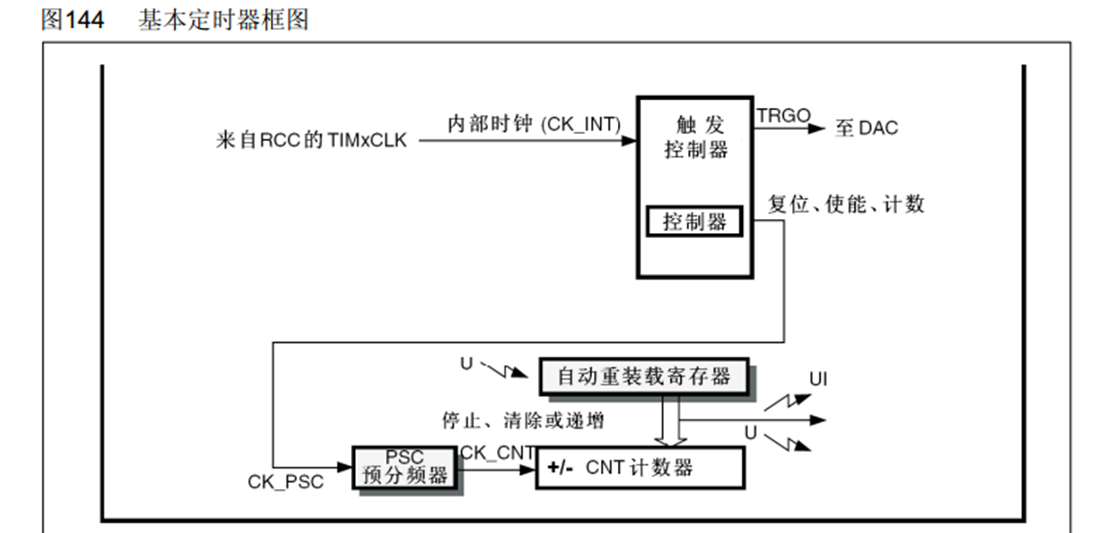
基本定时器
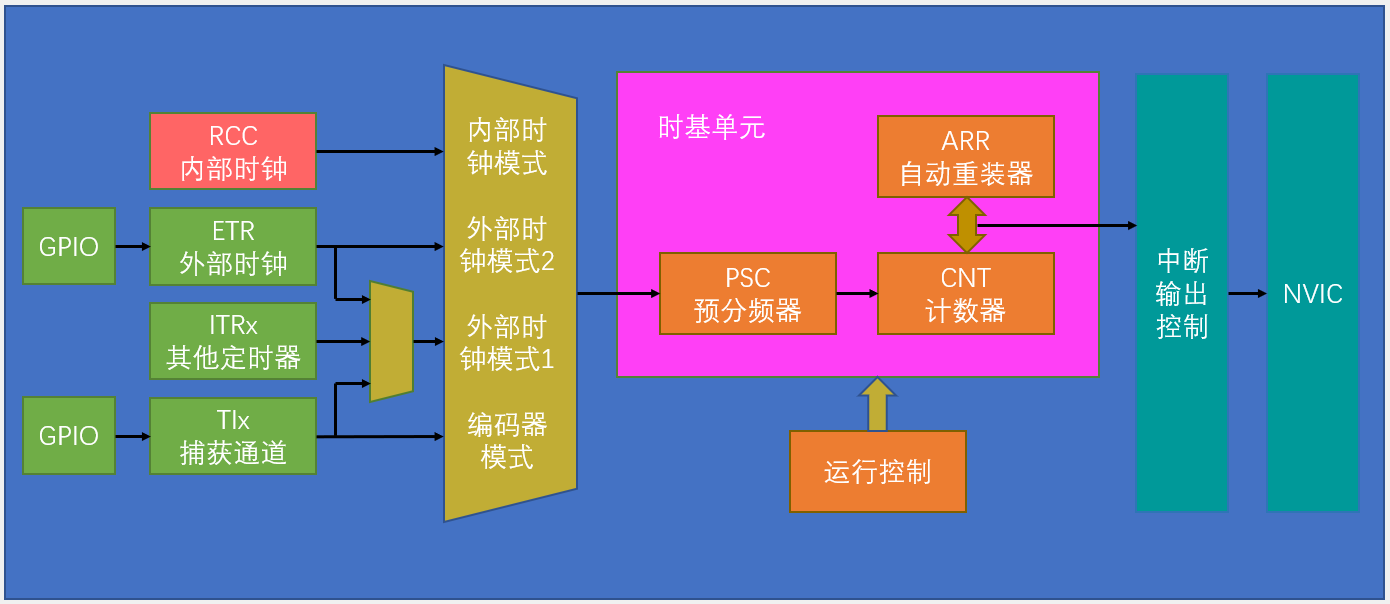
定时中断基本结构
预分频器时序
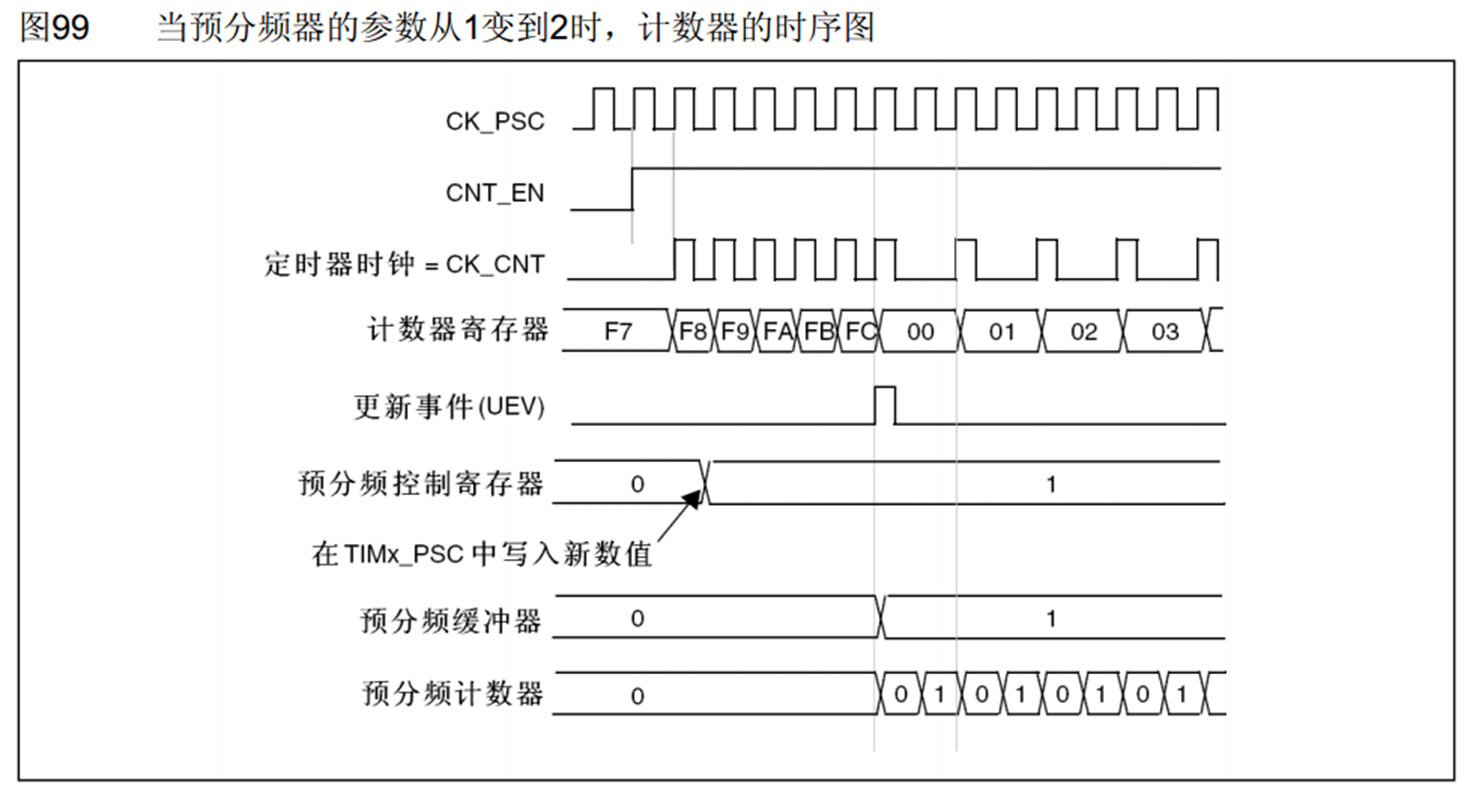
计数器计数频率:CK_CNT = CK_PSC / (PSC + 1)
计数器时序
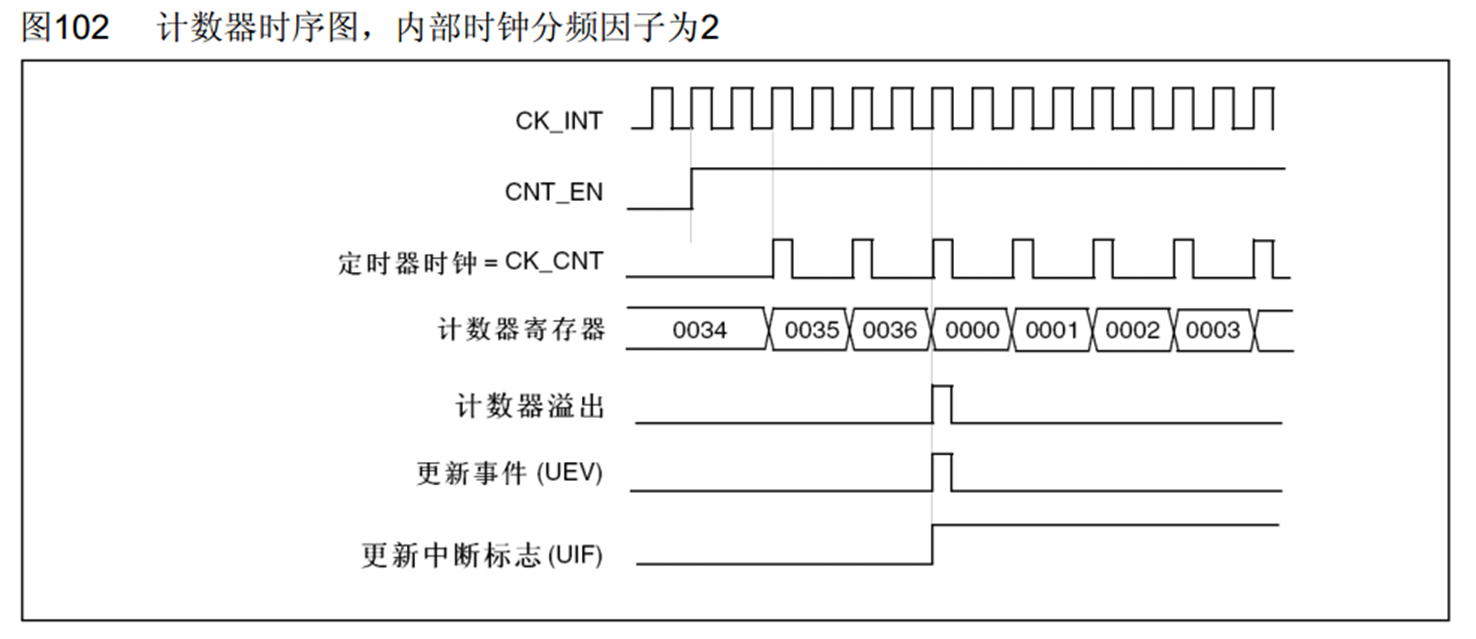
计数器溢出频率:CK_CNT_OV = CK_CNT / (ARR+1) = CK_PSC / (PSC+ 1) / (ARR+1)
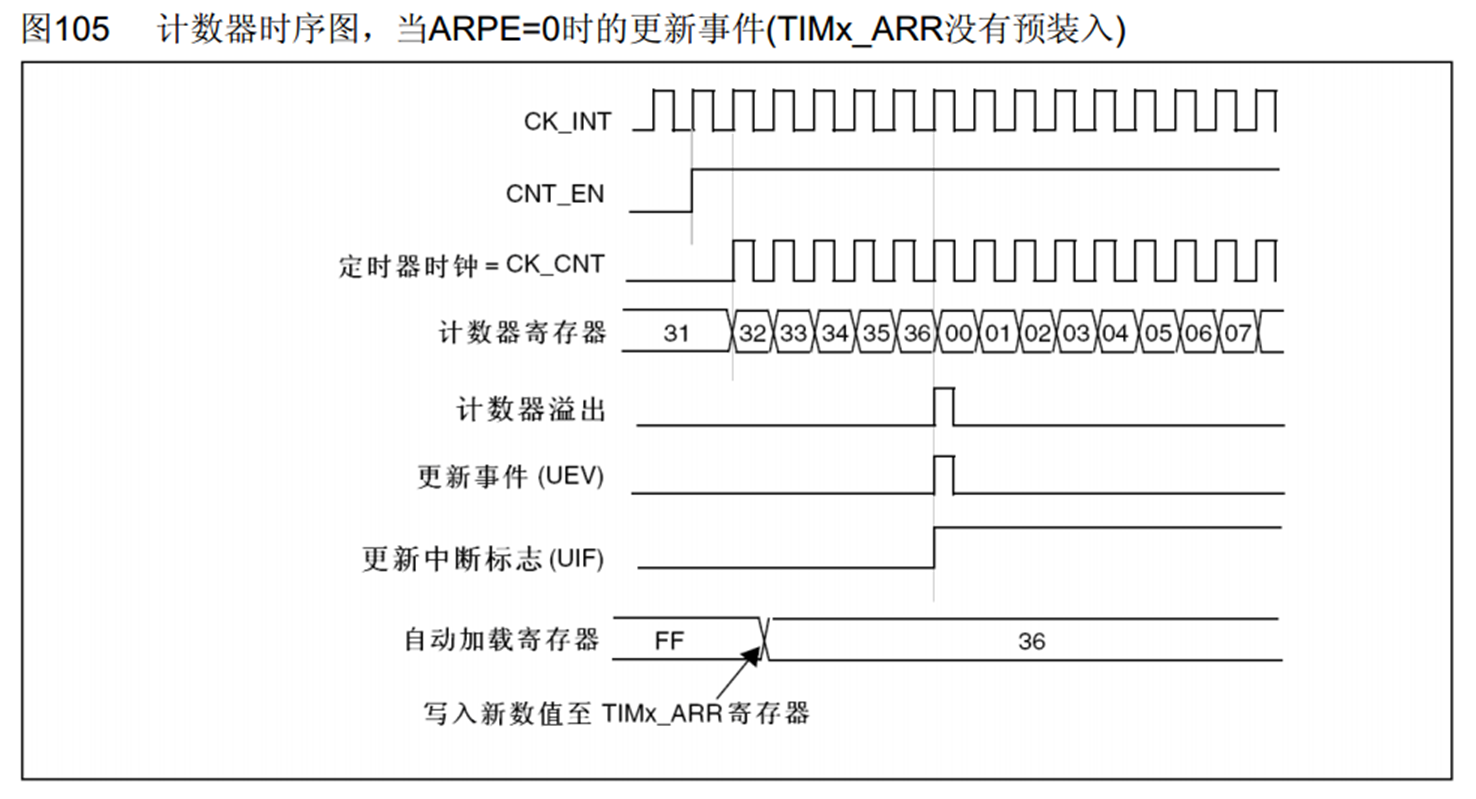
计数器无预装时序
计数器有预装时序

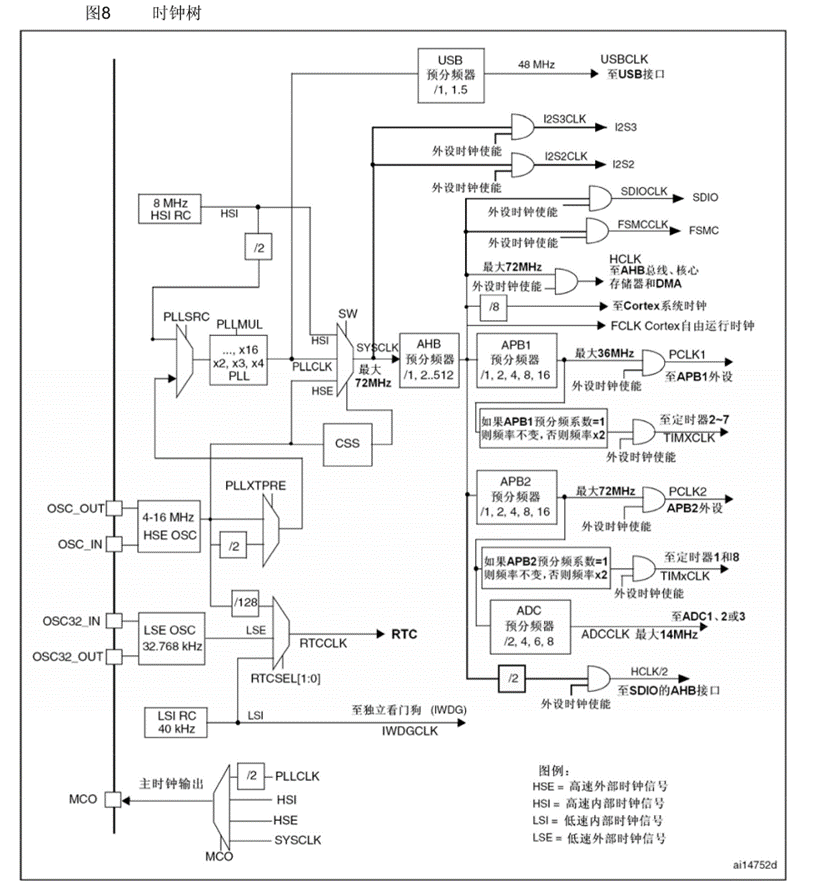
RCC时钟树
定时器定时中断
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
uint16_t Num;
int main(void)
{
OLED_Init();
Timer_Init();
OLED_ShowString(1,1,"Num:");
while(1)
{
OLED_ShowNum(1,5,Num,5);
OLED_ShowNum(2,5,TIM_GetCounter(TIM2),5);
}
}
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET)
{
Num++;
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
}
Timer.c
#include "stm32f10x.h" // Device header
void Timer_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启时钟
TIM_InternalClockConfig(TIM2); //选择时基单元时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //指定时钟分频(滤波)---一分频
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; //周期 ARR
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//指定计数器模式---向上计数
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器(高级定时器)
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //把更新中断标志位清除———避免刚初始化化完就进中断的问题
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启更新中断到NVIC的通路
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //NVIC优先级分组
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //响应优先级
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE); //使能计数器
}
/*
void TIM2_IRQHandler(void) //TIM2中断函数
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) //获取中断标志位---更新标志位
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除标志位
}
}
*/
Timer.h
#ifndef __TIMER_H
#define __TIMER_H
void Timer_Init(void);
#endif
定时器外部时钟
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
uint16_t Num;
int main(void)
{
OLED_Init();
Timer_Init();
OLED_ShowString(1,1,"Num:");
OLED_ShowString(2,1,"CNT:");
while(1)
{
OLED_ShowNum(1,5,Num,5);
OLED_ShowNum(2,5,Timer_GetCounter(),5);
}
}
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET)
{
Num++;
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
}
Timer.c
#include "stm32f10x.h" // Device header
void Timer_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructer;
GPIO_InitStructer.GPIO_Mode =GPIO_Mode_IPU ;
GPIO_InitStructer.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructer.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructer);
TIM_ETRClockMode2Config(TIM2,TIM_ExtTRGPSC_OFF,TIM_ExtTRGPolarity_NonInverted,0x0F);//ETR引脚外部时钟2
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //预分频选择--不分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //指定计数器模式---向上计数
TIM_TimeBaseInitStructure.TIM_Period = 10 - 1; //周期 ARR--
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器(高级定时器)
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //把更新中断标志位清除———避免刚初始化化完就进中断的问题
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启更新中断到NVIC的通路
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //NVIC优先级分组
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE); //使能计数器
}
uint16_t Timer_GetCounter(void)
{
return TIM_GetCounter(TIM2); //返回CNT计数器的值
}
/*
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
*/
Timer.h
#ifndef __TIMER_H
#define __TIMER_H
void Timer_Init(void);
uint16_t Timer_GetCounter(void);
#endif