LED和蜂鸣器简介
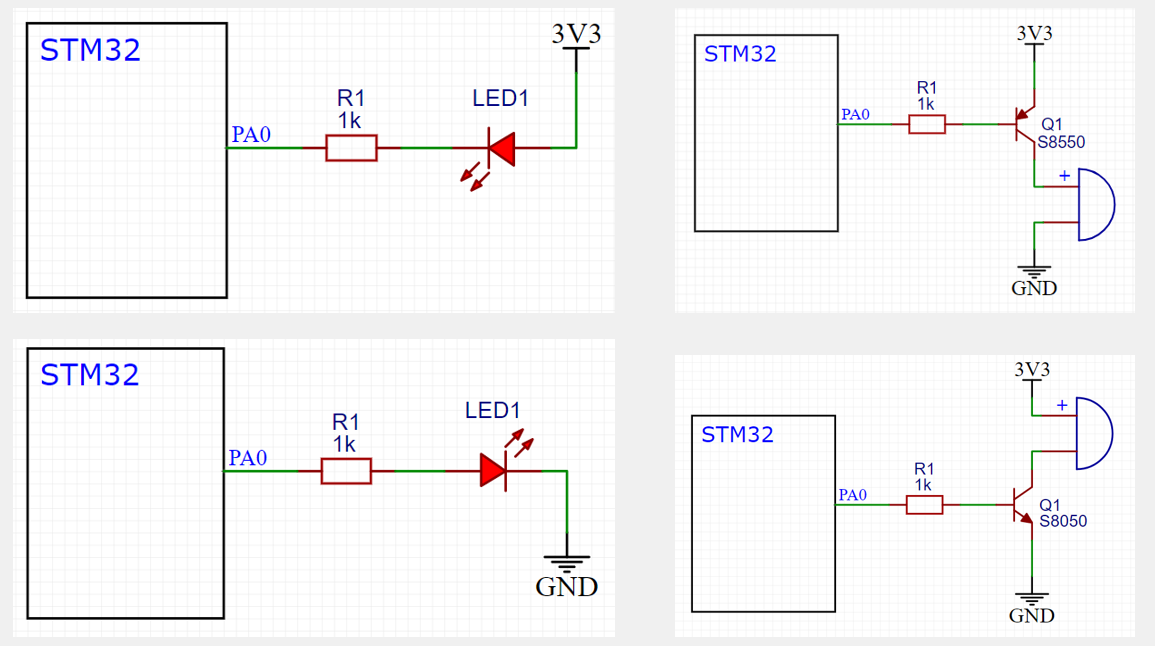
- LED:发光二极管,正向通电点亮,反向通电不亮。
- 有源蜂鸣器:内部自带振荡源,将正负极接上直流电压即可持续发声,频率固定。
- 无源蜂鸣器:内部不带振荡源,需要控制器提供振荡脉冲才可发声,调整提供振荡脉冲的频率,可发出不同频率的声音。
硬件电路
按键简介
- 按键:常见的输入设备,按下导通,松手断开。
- 按键抖动:由于按键内部使用的是机械式弹簧片来进行通断的,所以在按下和松手的瞬间会伴随有一连串的抖动。
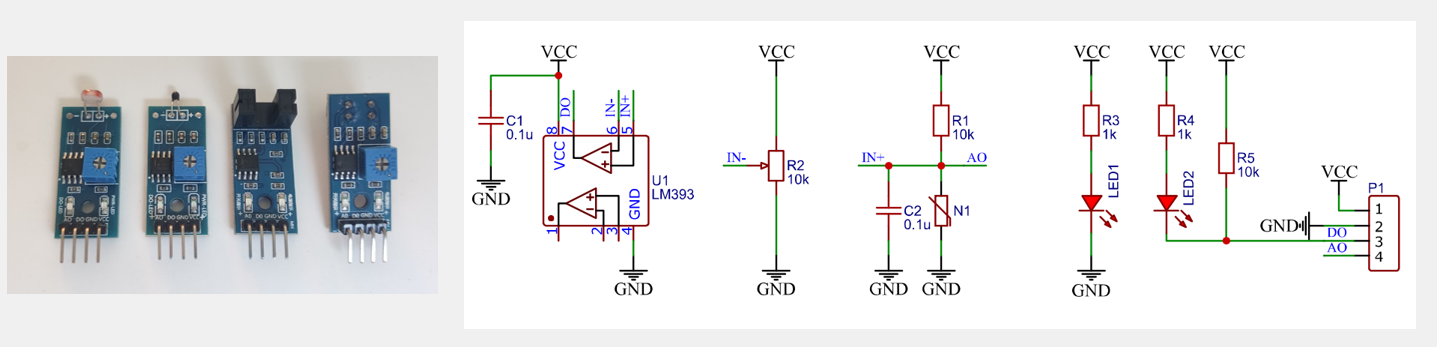
传感器模块简介
- 传感器模块:传感器元件(光敏电阻/热敏电阻/红外接收管等)的电阻会随外界模拟量的变化而变化,通过与定值电阻分压即可得到模拟电压输出,再通过电压比较器进行二值化即可得到数字电压输出。
C语言数据类型
| 关键字 | 位数 | 表示范围 | stdint关键字 | ST关键字 |
|---|---|---|---|---|
| char | 8 | -128 ~ 127 | int8_t | s8 |
| unsigned char | 8 | 0 ~ 255 | uint8_t | u8 |
| short | 16 | -32768 ~ 32767 | int16_t | s16 |
| unsigned short | 16 | 0 ~ 65535 | uint16_t | u16 |
| int | 32 | -2147483648 ~ 2147483647 | int32_t | s32 |
| unsigned int | 32 | 0 ~ 4294967295 | uint32_t | u32 |
| long | 32 | -2147483648 ~ 2147483647 | ||
| unsigned long | 32 | 0 ~ 4294967295 | ||
| long long | 64 | -(2^64)/2 ~ (2^64)/2-1 | int64_t | |
| unsigned long long | 64 | 0 ~ (2^64)-1 | uint64_t | |
| float | 32 | -3.4e38 ~ 3.4e38 | ||
| double | 64 | -1.7e308 ~ 1.7e308 |
C语言宏定义
- 关键字:#define
- 用途:用一个字符串代替一个数字,便于理解,防止出错;提取程序中经常出现的参数,便于快速修改
- 定义宏定义:
#define ABC 12345
- 引用宏定义:
int a = ABC; //等效于int a = 12345;
C语言typedef
- 关键字:typedef
- 用途:将一个比较长的变量类型名换个名字,便于使用
- 定义typedef:
typedef unsigned char uint8_t;
- 引用typedef:
uint8_t a; //等效于unsignedchar a;
C语言结构体
- 关键字:struct
- 用途:数据打包,不同类型变量的集合
- 定义结构体变量:
struct{char x; int y; float z;} StructName;
因为结构体变量类型较长,所以通常用typedef更改变量类型名
- 引用结构体成员:
StructName.x = 'A';
StructName.y = 66;
StructName.z = 1.23;
或
pStructName->x= 'A'; //pStructName为结构体的地址
pStructName->y= 66;
pStructName->z = 1.23;
C语言枚举
- 关键字:enum
- 用途:定义一个取值受限制的整型变量,用于限制变量取值范围;宏定义的集合。
- 定义枚举变量:
enum{FALSE = 0, TRUE = 1} EnumName;
因为枚举变量类型较长,所以通常用typedef更改变量类型名。
- 引用枚举成员:
EnumName = FALSE;
EnumName =TRUE;